
Por Adam Zewe
Los investigadores del MIT han desarrollado un nuevo método para diseñar estructuras 3D que pueden transformarse desde una configuración plana a su forma curva completamente formada con sólo tirar de una cuerda.
Esta técnica podría permitir el despliegue rápido de un hospital de campaña temporal en el lugar de un desastre como un tsunami devastador, una situación en la que una acción médica rápida es esencial para salvar vidas.
El enfoque de los investigadores convierte una estructura 3D especificada por el usuario en una forma plana compuesta de piezas interconectadas. El algoritmo utiliza un método de dos pasos para encontrar la trayectoria con mínima fricción para una cuerda que se puede tensar para accionar la estructura suavemente.
El mecanismo de accionamiento es fácilmente reversible y, al soltar la cuerda, la estructura recupera rápidamente su configuración plana. Esto podría permitir almacenar y transportar estructuras tridimensionales complejas de forma más eficiente y económica.
Además, los diseños generados por su sistema son independientes del método de fabricación, por lo que se pueden producir estructuras completas mediante impresión 3D, fresado CNC, moldeo u otras técnicas.
Este método podría permitir la creación de dispositivos médicos transportables, robots plegables que puedan aplanarse para ingresar a espacios difíciles de alcanzar o incluso hábitats espaciales modulares que puedan ser accionados por robots que trabajen en la superficie de Marte.
La simplicidad de todo el mecanismo de accionamiento es una gran ventaja de nuestro enfoque. El usuario solo necesita proporcionar el diseño que desea, y nuestro método lo optimiza de tal manera que mantiene la forma con un solo tirón de la cuerda, lo que facilita el despliegue de la estructura. Espero que este método se pueda usar para crear una amplia variedad de estructuras desplegables diferentes, afirma Akib Zaman, estudiante de posgrado en Ingeniería Eléctrica e Informática (EECS) y autor principal de un artículo sobre este nuevo método.
En el artículo, colaboran la estudiante de posgrado del MIT Jacqueline Aslarus; el investigador posdoctoral Jiaji Li; la profesora asociada Stefanie Mueller, líder del Grupo de Ingeniería de Interacción Persona-Computadora (HCI) del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL); y la autora principal Mina Konaković Luković, profesora adjunta y líder del Grupo de Diseño Algorítmico del CSAIL. La investigación se presentó en la Conferencia y Exhibición SIGGRAPH de la Asociación para la Maquinaria de Computación sobre Gráficos por Computadora y Técnicas Interactivas en Asia.
Del arte antiguo al algoritmo
La creación de estructuras desplegables a partir de piezas planas simplifica el montaje in situ y podría ser especialmente útil para construir refugios de emergencia tras desastres naturales. A menor escala, artículos como los cascos de bicicleta plegables podrían mejorar la seguridad de los ciclistas que, de otro modo, no podrían llevar un casco voluminoso.
Pero convertir objetos planos y desplegables en su forma 3D a menudo requiere equipo especializado o múltiples pasos, y el mecanismo de actuación suele ser difícil de revertir.
Debido a estos desafíos, las estructuras desplegables suelen diseñarse manualmente y presentan una geometría bastante simple. Pero si logramos crear geometrías más complejas, simplificando al mismo tiempo el mecanismo de accionamiento, podríamos mejorar las capacidades de estos desplegables, afirma Zaman.
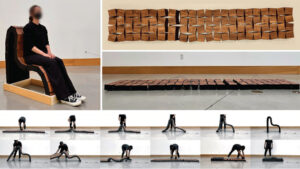
Para lograrlo, los investigadores crearon un método que convierte automáticamente el diseño 3D de un usuario en una estructura plana compuesta de mosaicos, conectados por bisagras giratorias en las esquinas, que pueden accionarse completamente tirando de una sola cuerda una vez.
Su método descompone el diseño de un usuario en una cuadrícula de mosaicos cuadriláteros inspirados en el kirigami, el antiguo arte japonés del corte de papel. Con el kirigami, al cortar un material de ciertas maneras, pueden codificarlo con propiedades únicas. En este caso, utilizan el kirigami para crear un mecanismo auxético, una estructura que se engrosa al estirarse y se adelgaza al comprimirse.
Tras codificar la geometría 3D en un conjunto plano de teselas auxéticas, el algoritmo calcula el número mínimo de puntos que la cuerda de tensado debe elevar para desplegar completamente la estructura 3D. A continuación, encuentra la ruta más corta que conecta esos puntos de elevación, incluyendo todas las áreas del límite del objeto que deben conectarse para guiar la estructura a su configuración 3D. Realiza estos cálculos de tal manera que la ruta óptima de la cuerda minimiza la fricción, permitiendo que la estructura se accione suavemente con un solo tirón.
Nuestro método facilita las cosas al usuario. Solo tiene que introducir su diseño y nuestro algoritmo se encarga automáticamente del resto. Después, el usuario solo tiene que fabricar las piezas exactamente como las calculó el algoritmo, afirma Zaman.
Por ejemplo, se podría fabricar una estructura utilizando una impresora 3D multimaterial que imprima las bisagras de las baldosas con un material flexible y las demás superficies con un material duro.
Un método independiente de la escala
Uno de los mayores desafíos que enfrentaron los investigadores fue descubrir cómo se puede modelar de manera efectiva la ruta de la cuerda y la fricción dentro del canal de la cuerda lo más cerca posible de la realidad física.
Al experimentar con algunos modelos fabricados, observamos que cerrar las baldosas de contorno es imprescindible para un despliegue exitoso y que la cuerda debe pasar a través de ellas. Posteriormente, demostramos esta observación matemáticamente. Después, revisamos una antigua ecuación física y la usamos para formular el problema de optimización para la minimización de la fricción, explica.
Incorporaron su algoritmo automático en una interfaz de usuario interactiva que permite diseñar y optimizar configuraciones para generar objetos fabricables.
Los investigadores emplearon su método para diseñar diversos objetos de diferentes tamaños, desde artículos médicos personalizados, como una férula y un corrector postural, hasta una estructura portátil similar a un iglú. También fabricaron una silla plegable a escala humana, diseñada con su método.
Este método es independiente de la escala, por lo que podría usarse para crear pequeños objetos desplegables que se inyectan y se activan dentro del cuerpo, o estructuras arquitectónicas, como el marco de un edificio, que se despliegan y se activan en el sitio utilizando grúas.
En el futuro, los investigadores quieren explorar más a fondo el diseño de estructuras diminutas, a la vez que abordan los retos de ingeniería que implica la creación de instalaciones arquitectónicas, como determinar el grosor ideal del cable y la resistencia necesaria de las bisagras. Además, buscan crear un mecanismo autodesplegable, de modo que las estructuras no necesiten ser accionadas por un humano o un robot.
